前回(172話参照),IRセンサーに赤外線発光ダイオード(LED)をハンダ付けして,パッシブセンサーをアクティブセンサーに変更した。171話のロボットに付いているIRセンサーを,LEDをハンダ付けしたIRセンサーに変え,同じプログラムを実行してみた。タンスの前に来たら,暗いと判断してバックし,しばらくすると明るくなったと思い直し,前進すればシメシメなのだが,そうは問屋が卸さなかった。アクティブセンサーをつけたロボットは,何の迷いもなくタンスにぶつかっていった。
ハンダ付けを失敗したのかと思った。見えないものをみるにはテスターが必要だ,と三千円弱のデジタルマルチテスターをDIYショップで購入した。
前回のハンダゴテ同様,筆者はテスターもほとんど使った経験がない。テスターに付属している薄っぺらなマニュアルとにらめっこするが,なんとなく理解したような気になっただけで,はっきりしない。
「やってみないとわからんな」と計測をはじめると,私の様子を横目でみていたかずが寄って来る。やはり,自分でハンダ付けした結果が気になるのだろう。
RoboDesignerの基本セットにPDF形式で付属しているRDSX01説明書と,ジャパンロボテックのサポートページで公開されている「ライントレース用ロボット製作のヒント」を参考に試してみる。

IRセンサーの感度を最大にした状態(感度調整用半固定抵抗のボリュームを左にいっぱい回した状態)で,回路電圧は約5Vになると書いてあるので,DCV(直流電圧)の5レンジの内,20Vを選択すれば適切な値が返ってくることがわかった。
IRセンサーをつないだコントローラボードのコネクタで計測すればよいのだが,赤のテストプロッドを真ん中のコードの接続部にあて,黒を左側にあてればよいことはRDSX01説明書の41ページを見てわかった。
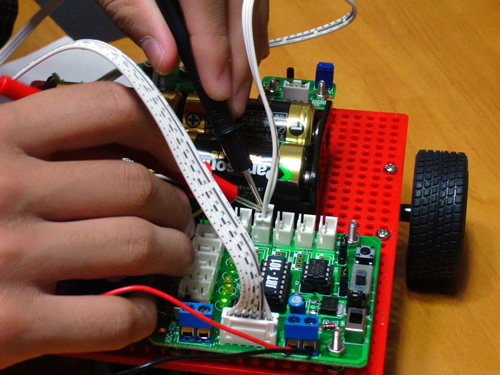
テスターのテストプロッドで計測しやすいように,コードの根元のところまで接触部から金属が伸びている。

のような値をかずが読み上げた。
こんな風に書くと,すんなり進んだように思われるかもしれないが,実はちゃんと説明書を読まずに始めたので,2000mのポジションで計測したら大きな値が返ってきたり,マイナスの値が表示されたりと,まともな値にたどり着くまで,すったもんだしたのだ。
「明るい」は白い紙にIRセンサーを向けて測った値で,「暗い」は黒い折り紙をあてて測った値である。
LEDをつけたIRセンサーの電圧値も明るい,暗いでちゃんと開きがあるので,ハンダ付けはうまくいっているようだ。さっそく,かずと一緒にライントレーサーを作ってみた。
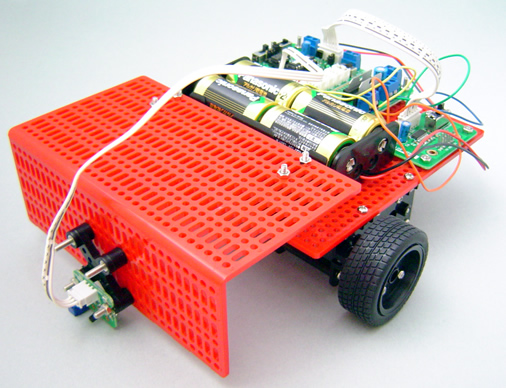
直角に曲がったプレートの先に,地面を見るようにIRセンサーを取り付けた。次回はプログラムを作って,テストしてみよう。
第173話 見えないものを見るには
あなたにお薦め
今日のピックアップ
-

NECが受注したe-Govのガバクラ移行が大幅遅延、構築手法の途中変更が影響か
-
生成AIを悪用して拡散するワームが登場する恐れ、セキュリティー研究者が警鐘
-
Javaはなぜかっこ悪いと思われているのか、ChatGPTと共に原因を探ってみた
-
PayPayと三井住友カードが取引履歴で資金繰り支援、加盟店取り込みへ高まる熱
-
有名人になりすまして投資広告を掲載、SNSで接触してみた結果
-
「四重苦」で伸び悩む日本市場、なぜ海外スマホメーカーが開拓に本腰を入れるのか
-
IIJ公式サイトのPVがある日突然13倍に、バズったわけでも炎上したわけでもない裏側
-
JavaScriptの文末のセミコロン、付けない場合はいったい何が起こるのか
-
ミッドレンジスマホのお薦めランキング、「値下げ」でコスパに変化
-
M3搭載「MacBook Air」とM2搭載モデルを比較、外付けディスプレー2台接続も試す
-
画面デザインが激変したAcrobat Reader、慣れるまでは旧UIとの併用も
-
縦長のWebページ全体を画像で保存、メニューから選べるEdgeがChromeより便利












 注目記事
注目記事






おすすめのセミナー
-
「仮説立案」実践講座
例えば「必要な人材育成ができていない」といった課題に、あなたならどう取り組みますか? このセミナ...
-
CIO養成講座 【第35期】
業種を問わず活用できる内容、また、幅広い年代・様々なキャリアを持つ男女ビジネスパーソンが参加し、...
-
改革リーダーのコミュニケーション術
プロジェクトを成功に導くために改革リーダーが持つべき3つのコミュニケーションスキル—「伝える」「...
-
パワポ資料が見違える「ビジネス図解」4つのセオリー
インフォグラフィックスとは、形のない情報やデータなど伝えたいことを分かりやすい形で表現する技法で...
-
間違いだらけの設計レビュー
本セミナーでは、現場で多く見られる間違ったレビューの典型例を示し、そうならないための現場の改善策...
-
オンライン版「なぜなぜ分析」演習付きセミナー実践編
このセミナーでは「抜け・漏れ」と「論理的飛躍」の無い再発防止策を推進できる現場に必須の人材を育成...
-
問題解決のためのデータ分析活用入門
例えば「必要な人材育成ができていない」といった課題に、あなたならどう取り組みますか? このセミナ...
-
業務改革プロジェクトリーダー養成講座【第16期】
3日間の集中講義とワークショップで、事務改善と業務改革に必要な知識と手法が実践で即使えるノウハウ...








注目のイベント
-
日経クロステックNEXT 関西 2024
2024年5月16日(木)~5月17日(金)
-
日経ビジネスCEOカウンシル
2024年5月16日(木)17:00~19:50
-
VUCA時代に勝ち残る戦略的サプライチェーン構築に向けて
2024年 5月 24 日(金) 10:00~16:20
-
人手不足を乗り越える 日本の産業界成長のシナリオ2024
2024年5月30日(木)10:20~17:45
-
キャリア・オーナーシップが社会を変える
2024年6月3日(月)~6月5日(水)
-
DX Insight 2024 Summer
2024年6月4日(火)、5日(水)
-
WOMAN EXPO 2024
2024年6月8日(土)10:00~17:30
-
デジタル立国ジャパン2024
2024年6月10日(月)、11日(火)
-
DIGITAL Foresight 2024 Summer
2024年6月13日(木)~8月8日(木)16:00~17:00 ※毎週火・木曜開催予定
-
成長戦略への次の一手、製品・サービス強化に効くDXの本質(仮)
2024年 6月 14日(金)










おすすめの書籍
-
ソフトバンク もう一つの顔 成長をけん引する課題解決のプロ集団
ソフトバンクにはモバイルキャリア事業以外のもう一つの顔が存在する。本書ではキーパーソンへのインタ...
-
対立・抵抗を解消し合意に導く 改革リーダーのコミュニケーション術
本書は、改革リーダーに必須のコミュニケーション術を3つのスキルの観点からまとめ上げたものです。今...
-
もっと絞れる AWSコスト超削減術
本書ではコスト課題を解決するため、AWSコストを最適化し、テクニックによって削減する具体策を紹介...
-
優秀な人材が求める3つのこと 退職を前提とした組織運営と人材マネジメント
「学生に人気のコンサルであっても、大手企業であっても、せっかく獲得した人材が数年で辞めてしまう...
-
Web3の未解決問題
ブロックチェーン技術を主軸とするWeb3の技術について、現在の社会制度との摩擦と、その先にある新...
-
ロボット未来予測2033
ロボットの用途・市場はどう拡大していくのか。AI実装でロボットはどこまで進化するのか。技術の進展...






日経BOOKプラスの新着記事
-
「お前、もう帰れ!」東大卒の開発者が料亭で叱られた
-
はじめに:『金利 「時間の価格」の物語』
-
話題の本 書店別・週間ランキング(2024年4月第3週)
-
マッキンゼー調査で判明 日本企業のM&Aに求められる戦略
-
新社会人が読んでおくべきおすすめのビジネス書 記事まとめ
-
『「キーエンス思考」×ChatGPT時代の付加価値仕事術』を著者田尻望が熱弁
-
はじめに:『図解 木造住宅トラブルワースト20+3 「雨漏り事故」「構造事故」の事例から学ぶ原因と対策』
-
はじめに:『美術館に行く前3時間で学べる 一気読み西洋美術史』
-
はじめに:『ジオストラテジクス マンガで読む地政学 世界の紛争・対立・協調がわかる』
-
東京・吉祥寺 街々書林 旅心を刺激する魅惑の本屋さん










日経クロステック Special
What's New
経営
- 経営の見える化を目指すマイナビの挑戦
- 「クラウド時代のあるべき運用」を熱く議論
- 大企業にもキントーンの導入が進む理由
- 製造業DX「データドリブン経営成功のシナリオとは」
- NTTドコモ支援の実践型教育プログラム
- ジェイテクトエレクトロニクスのDX事例
- NTTデータに優秀なデジタル人財が集まる理由
- オリックス銀行×富士通時田社長 特別鼎談
- 脱レガシー案件≫SIerに必要な人財像は
- 3段階で考える、DXで企業力を高める方法
- イノベーションの起爆剤
- 大規模プロジェクトでPMが注意すべき点は
- 大阪・名古屋エリアのDXが注目される理由
- 力点は「未来予測」へ:データ利活用の勘所
- 生成AI活用でSAP BTPの価値が進化
- ServiceNowでDXを加速≫方法は
- SAPプロジェクトの全体像をいかに描くか
- DX時代、IT人財/組織の“理想像”は?