ETロボコン密着レポート【前編】
やっぱりUMLは難しい?
ソフトを競うロボコンが始動

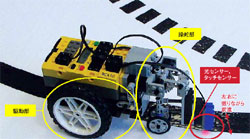 |
写真1●パスファインダー
デンマークLEGO社のLEGOブロックを組み立てて作ったロボット「パスファインダー」。方向を決める操舵部と,駆動部,2種類のセンサーから成る。光センサーから得られた値によって白か黒かを判断し,常に黒いラインに沿って走行できるように操舵部や駆動部を制御する。黒いラインの右端にセンサーが合うようにパスファインダーを置き,白を検出したら左に,黒を検出したら右に舵を切るように走らせるのが一般的な走り方。 |
|
 |
図1●コース
インコースとアウトコースの2コースがあり,それぞれを1回ずつ走行して速度を競う。コースには大きく三つの仕掛けが施されている。必ず走行しなくてはならないのはスロープだ。あとの二つは,近道をしたい場合に走行する。どちらも通常のコースを走るよりもハードルが高い。点線部分はコースラインを認識するのが難しいし,オフロードでは障害物に車輪を取られないように進む必要がある。 |
|
 |
図2●夢考房.NETチームが作成中のクラス図の一部
まず1年生が手探りでモデリングをし,それを上級生が指導する。教職員はなるべく口を挟まず,できるところまで学生に任せるのが夢考房のモットーだ。まず,ロボットが実現すべき動作を文章で表現し,名詞と動詞を抽出してクラスやメソッドになるものを探す。基本的には名詞がクラス,動詞がメソッドとなり得るが,単純にそれだけではうまくいかない。例えば「最初は“速度”のような状態を示すものをクラスとしてしまう,などというミスが見られた」(高井氏)。現状でもまだ不備はある。「“識別”は,名詞だが動詞として扱うべきもの。このように日本語に対する理解の不足からモデリングを誤るケースも見られる」(金沢工業大学情報フロンティア学部の江見圭司講師)。 |
|
自作のソフトウェアを組み込んだロボットを走らせ,タイムを競う。ソフトウェアの設計情報であるモデル図も審査の対象。2005年7月に日本システムハウス協会(JASA)の主催で開催される「ETソフトウェアデザインロボコン(ETロボコン)」は,数あるロボット・コンテストの中でもやや異色の存在だ。ハードウェアの機能や性能を競い合うのでなく,純粋にソフトウェアの出来で勝負する。大学や企業,個人など53チームが参加する。7月の本番に向けて,各チームの開発作業が本格化している。
今号から2回にわたって,2チームの密着レポートをお届けする。一からモデリングやプログラミングを学びながらコンテストに挑む金沢工業大学の「夢考房.NET」チームと,プロの開発者で構成されるNECソフトウェア北陸の「ムンムン」チームだ。両チームは物理的に距離が近く,密に情報交換を重ねながら開発を進めている。
夢考房.NETチームは,リーダーを務める3年生の福澤貴則氏を筆頭に,4年生1人,1年生3人の5人から成る。1年生3人はモデリングはおろかプログラミングの経験もほとんどなく,4年生の高井純氏が一から指導してきた。
ムンムンチームは,組み込み開発に携わる技術者から成るチーム。昨年の競技会では優勝を収めた強豪だ。
密着取材から,必要性が叫ばれながら組み込み開発への導入が進まないモデリングの重要性や難しさが見えてきた。同時に,組み込み開発ならではの楽しさや熱気も伝わった。
(八木 玲子)



















































