「乗り物かお城のプラモデルを作ってみたい」と小5の末娘ほのちゃんが言ったので,NISSAN Cube EXのプラモデルを買った。一番欲しいのはお城,といっても大阪城や姫路城ではなく,西洋のキャッスルだったようだが,店に売っていないので,昨年まで担任してくれていた先生が乗っていた日産キューブを選択した。
筆者は,今年度,小学校のPTA会長に加え,自治会の総務委員長を引き受けてしまったので,土日にたいてい用事があり,娘をどこか遠くに連れて行ってやることができない。その分,家で空いた時間に娘と一緒に遊ぶことができるのが楽しい。
ほのは本を読むことや女の子らしい人形作りも好きであるが(ヒマさえあれば,チクチクと針を動かしており,休日は朝起きるといきなり本を読み出す),かなり趣味が変わっている。まず,鉄子。電車に乗るのが大好きだ。乗っているだけで楽しいらしい。それから,カメラ好き。コンパクトなデジカメを首から下げて,出かけることも多い。
そして,日本史好き。NHK大河ドラマ「篤姫」が大好きだった。それに,5年生になってから,剣道を習い始めた。親バカは百も承知だが,ほのはスラッとしているので,胴着と袴がよく似合う。「武士道シックスティーン」の映画化で剣道ブームが来るのだろうか。
末娘の趣味には兄や父の悪影響が感じられるが,長男こうしろうが就職活動を控える大学三回生,次男かずが受験を控える高校三年生になった現在,娘にプラモデル作りの手ほどきができる時間は父にとって貴重である。
うれしくなった父は,どこに片付けたか忘れてしまったプラモデル用のピンセットやニッパを新しく買い揃えた。
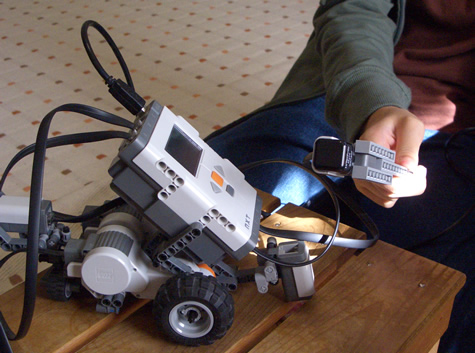
10月12日 調子に乗った父は,ジャイロスコープ・センサ(以下,ジャイロセンサ)を使ったロボット・プログラミングにほのを誘う。目的は2輪のロボットをジャイロセンサで倒立させることだが,今日はジャイロセンサの返す値によりロボットをコントロールする方法を学ぶ。アフレルの「ROBOLABにおけるジャイロセンサの使い方」からダウンロードしたテキストの2番目のプログラムを作成してみる。
ほのにとっては初めてのROBOLABプログラミングなので,ループを構成するジャンプコマンドやコンテナとは何かの値を入れておくところという説明から始める。もっとも鉄子なら,コンテナはさっと理解してほしい。
そんなことより,やはり,最初に戸惑うのは,どこにどんなコマンドがあるかである。特に画面表示はNXTコマンド・グループにあり,ジャイロセンサ関連のコマンドはユーザー・ライブラリにあるので,あっちを開いたり,こっちを開いたりしなければならない。よく使うコマンドが勝手に集まって表示されるようなユーザー・インタフェースにならないものかと思う。
最初のコマンドはポート3につないだジャイロセンサの初期化である。次に赤着地,最後の方にある赤ジャンプの着地地点である。それから,ポート3の値を赤コンテナに入れ,その値を液晶ディスプレイに表示する。ポートやコンテナを指定するモディファイアの背景色によって,ポートとポートの値,コンテナとコンテナの値と使い分けすることを説明した。
0.2秒待つ時計マークのウェイト・コマンドの後ろが今回重要なAngular Velocity Fork(角速度分岐)コマンドである。ポート3のジャイロセンサが返す角速度が100を超えたら,分岐の上のラインに進み音を鳴らす。そうでない場合は単に合流して,赤ジャンプでループする。
ジャイロセンサを素早くピッと動かすと音が鳴り,ゆっくり大きく動かしても音はならない。角速度分岐コマンドは一定時間の回転角度を測定しているのである。上のプログラムを見ると赤コンテナに入れて,液晶ディスプレイに表示したジャイロセンサの値と0.2秒後に角速度分岐コマンドが計測した値とを比較しているように見えるかもしれないが,表示した値とは何の関係もない。
上記のプログラムのように,ジャイロセンサの値を赤コンテナに入れて,液晶ディスプレイに表示する処理を除いても,液晶ディスプレイに値が表示されないだけで,体感できる実行結果は同じであった。
次回は2輪で立つロボットの製作に進もうと思う。今回のほのの感想は「音が出るロボットはたのしい!」だった。



















































