2005年度より,「WRO Japan」の富山県予選に携わっている。

今年のWRO Japan(国内決勝大会)の課題はこれまでより,ずっと難しいように思えた。しかし,予選会でもそのルールに準拠した競技をやらないと,決勝大会での活躍は望めない。今年度から,講習会に参加した児童には荷が重いかなと思いつつ,練習の進み具合を見ていた。
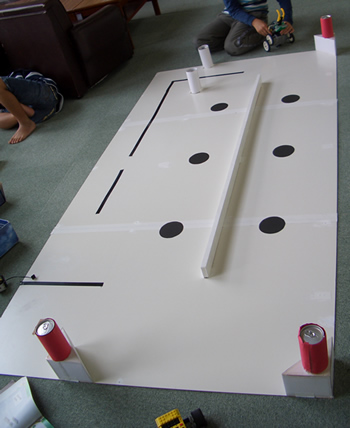
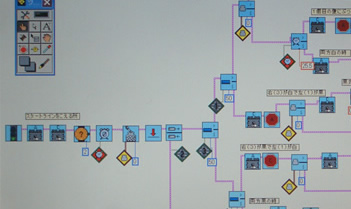
小学生部門の競技の練習用のコースである。ロボットは手前左の黒い線からスタートし,黒い線をライントレースして奥左側のゲートをくぐる。ゲートをくぐると10点が加算される。次にターゲットである赤い缶を倒す。奥右側が1番で,手前右が2番,手前左が3番,この順番通りに缶を落としていく。決勝大会のルールでは一缶倒すごとに10点のポイントが与えられる。
ロボットは缶と缶の間を,真ん中の白い壁を頼りにするか,あるいはフィールド上の黒丸を頼りに進む。もっとも,一か八か,シーケンス制御だけでコースを進む強者もいる。
最後にまたゲートをくぐって黒い線をたどりスタート位置に戻り,ゴールとなる。競技時間は120秒だ。
7月26日,二上まなび交流館でのロボット・プログラミング講習会を実施する。翌日に富山予選会を控え,受講者たちにも熱が入ってきた。今年は国内決勝大会が8月31日なので,例年より1カ月ほど早いスケジュールだ。
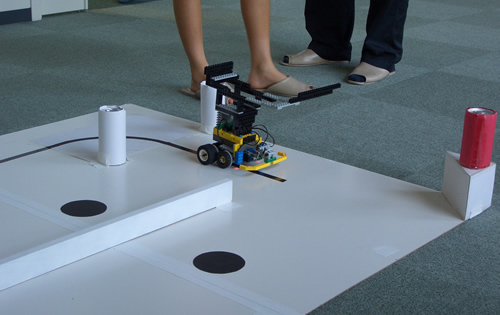
きびしいスケジュールのなか,子供たちの多くはライントレースをして1番の缶を倒すところまではプログラミングできるようになった。途中でトレースする黒い線がなくなるので,光センサーを2個使ってライントレースしている子が多い。ロボットの前方にはタッチセンサーを仕込んだバンパーを取り付けてある。障害物は缶を置いた三角の台と真ん中の白い壁である。
障害物はガイドとも考えることができる。タッチセンサーが押されたときは,ターゲットである缶を載せた三角にぶつかったときか,白い壁にぶつかったときだ。
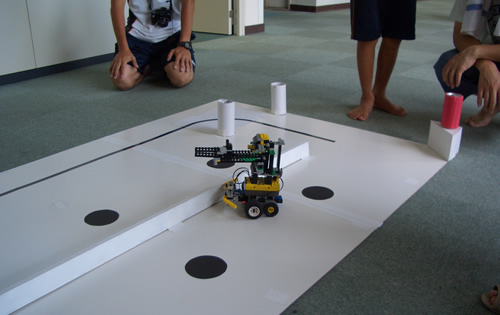
しかし,MINDSTORMSの本体,黄色いRCXにはセンサーをつなぐ入力ポートが3つしかない。ライトセンサーを2個つなぐとタッチセンサーを1個仕込んだシングルバンパーしか使えなくなってしまう。
筆者が頭に描いた攻略イメージは,光センサーが1個で,タッチセンサーを2個使ったダブルバンパーのロボットだった。左側のバンパーが触れるのは三角であり,右側のバンパーが触れるのは常に壁だからである。
でも,ライトセンサーが1個だと,黒い線がなくなったと判断するのが難しいせいか,シングルバンパーのロボットがほとんどだった。
小学生が作るプログラムも年々複雑なものになってきた。プログラムは全員がROBOLABで作成している。
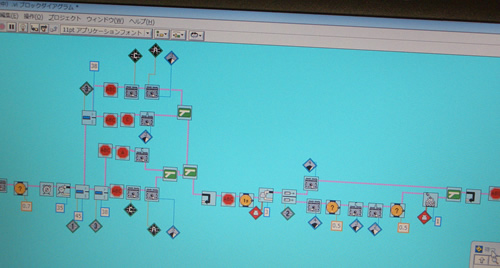
コースの順に部分部分でループを仕掛けて,課題をこなしていくタイプのプログラムもある。
また,一つの大きなループのなかで,コンテナを使ってコースの状況を判断しているものもある。
自分でロボットを作り,コースを攻略したわけではないので,偉そうなことは言えないが,アクシデントに対し冗長性を持たせることやプログラムを実際のコースで何度もテストし,あそびを持たせることがコツかもしれない。



















































