小学4年生の娘ほのちゃんはファンタジーが大好きだ。ファンタジー小説好きの妻に「この本おもしろいよ」とファンタジーをこれでもかと勧められた結果かもしれない。自分でお話を作るのも大好きだ。
7月6日 タッチセンサ・スイッチブロックを使ったロボットを作成する。
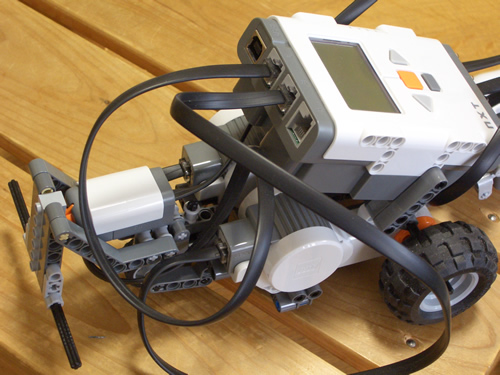
ロボットの先頭にタッチセンサを押し込まれやすいようにバンパー付きで取り付ける。
ちなみに7月6日は東海北陸自動車道が全線開通した日だ。我が家から最寄りの小矢部砺波JCTから一宮ICまでが3時間弱で結ばれた。これまで,富山からは新幹線で東京や特急サンダーバードで京都,大阪方面に行くことはあっても,あまり名古屋に行くことはなかった。車で日帰りできる時間になったので,今後は状況が変わるかもしれない。
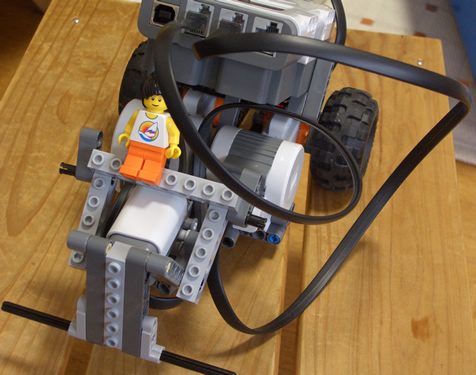
ほのはロボットの上に,レゴの人形をのせた。「ロボットが大グモで名前はルナデス,人形はミーナ。大グモはクモだけど悪者じゃない」とほののファンタジー・ワールドが広がった。
ほのならでは楽しみ方を見つけてくれたことが父はうれしかったが,ファンタジー・ワールドに入り込むときりがないので,プログラムの作成を促した。
プログラムの仕様はほのが考えた。障害物を避けて走るプログラムだ。タッチセンサが押されていないときは「まっすぐ進む」,タッチセンサが押されているときは「バックする」,「右に曲がる」,「まっすぐ進む」だ。
無限ループの中にタッチセンサ・スイッチブロックを入れ,タッチセンサが押されていないとき(下段)はB,Cのモーターを回す。タッチセンサが押されているとき(上段)はB,Cのモーターを1秒間,逆方向に回す。その後,Cのモーターを回す。この二つのアイコンが「バックする」,「右に曲がる」に対応している。
「ほのちゃん,その後のまっすぐ進むは要らないの?」と聞くと「あっ,入れんなんけ?」と必要ないんじゃないのと言いたげな返事をした。ループに戻れば,タッチセンサが押されていないときの動作をするから,右に曲がった後にまっすぐに進むとほのは考えたようだ。
「ああ,そうだね。それでいいね」とほのの考えを支持した。ロボット・プログラミングの講習会では,あえてわかりやすくするために無駄なステップも入れたりするのだが,無駄なコードを入れないのがプログラミングの原則だ。
しかし,頭で考えた通りにうまくはいかない。それがロボット・プログラミングだ。スタートボタンを押すとロボットはバックを始めた。すべてのモーターの回転方向を逆にすることで,希望通りの動作に変わった。

大グモは部屋の中を走り回り,障害物にぶつかってはバックし,曲がり,またまっすぐ走り出した。ミーナな大グモの上で大変なことになっていた。
つづく



















































