前回はMicrosoft Robotics Studio DocumentationのBasic Robotics Tutorials-Robotics Tutorial 1 (C#)に従い,Visual C#でタッチセンサーが押されたらOuch(アウチ=いて!)と表示するプログラムを作成した。
今回紹介するRobotics Tutorial2 (C#)の内容は,タッチセンサーが押されたらモーターをオン・オフすることだ。Tutorial1のプログラムにモーターを回すためのコードを追加していく。
まず,モーターを使うために以下のusing句を追加する。
---------------------------------------------------------- using motor = Microsoft.Robotics.Services.Motor.Proxy; ----------------------------------------------------------
次に自分が作成しているMyTutorial1 serviceとmotor serviceの間にパートナーシップを作成する。
----------------------------------------------------------
[Partner("motor", Contract = motor.Contract.Identifier,
CreationPolicy = PartnerCreationPolicy.UseExisting)]
private motor.MotorOperations _motorPort =
new motor.MotorOperations();
----------------------------------------------------------
モーターサービスと通信するには,MotorOperationsポートを作成して,Partner属性で識別できるようにする必要がある。
上記のコードを追加したクラスファイルは,MyTutorial1.csであるが,このプロジェクトにはもう一つクラスファイルがある。以下のMyTutorial1Types.csファイルである。
----------------------------------------------------------
using Microsoft.Ccr.Core;
using Microsoft.Dss.Core.Attributes;
using Microsoft.Dss.ServiceModel.Dssp;
using System;
using System.Collections.Generic;
using W3C.Soap;
using mytutorial1 = Robotics.MyTutorial1;
namespace Robotics.MyTutorial1
{
public sealed class Contract
{
public const String Identifier =
"http://schemas.tempuri.org/2007/01/mytutorial1.html";
}
[DataContract()]
public class MyTutorial1State
{
[DataMember]
public bool MotorOn;・・・ (1)
}
public class MyTutorial1Operations :
PortSet<DsspDefaultLookup, DsspDefaultDrop, Get>
{
}
public class Get :
Get<GetRequestType, PortSet<MyTutorial1State, Fault>>
{
}
}
----------------------------------------------------------
MyTutorial1Types.csファイルに施す変更は,MyTutorial1StateにデータメンバーMotorOn(ブール型)を追加することだ(1)。このメンバー変数にモーターが現在回っているか,止まっているかを記憶し,タッチセンサーを押されたときにモーターを回すか止めるか判断するのだ。
次に,MyTutorial1.csのBumperHandlerメソッドにモーターを回転させるコードを記述する。以下はMyTutorial1.csの全コードだ。
----------------------------------------------------------
using Microsoft.Ccr.Core;
using Microsoft.Dss.Core;
using Microsoft.Dss.Core.Attributes;
using Microsoft.Dss.ServiceModel.Dssp;
using Microsoft.Dss.ServiceModel.DsspServiceBase;
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Xml;
using mytutorial1 = Robotics.MyTutorial1;
using bumper = Microsoft.Robotics.Services.ContactSensor.Proxy;
using motor = Microsoft.Robotics.Services.Motor.Proxy;
namespace Robotics.MyTutorial1
{
[DisplayName("MyTutorial1")]
[Description("The MyTutorial1 Service")]
[Contract(Contract.Identifier)]
public class MyTutorial1Service : DsspServiceBase
{
private MyTutorial1State _state = new MyTutorial1State();
[ServicePort("/mytutorial1", AllowMultipleInstances=false)]
private MyTutorial1Operations _mainPort =
new MyTutorial1Operations();
[Partner("bumper", Contract = bumper.Contract.Identifier,
CreationPolicy = PartnerCreationPolicy.UseExisting)]
private bumper.ContactSensorArrayOperations _bumperPort =
new bumper.ContactSensorArrayOperations();
[Partner("motor", Contract = motor.Contract.Identifier,
CreationPolicy = PartnerCreationPolicy.UseExisting)]
private motor.MotorOperations _motorPort =
new motor.MotorOperations();
public
MyTutorial1Service(DsspServiceCreationPort creationPort) :
base(creationPort)
{
}
protected override void Start()
{
ActivateDsspOperationHandlers();
SubscribeToBumpers();
DirectoryInsert();
LogInfo(LogGroups.Console, "Service uri: ");
}
void SubscribeToBumpers()
{
bumper.ContactSensorArrayOperations bumperNotificationPort =
new bumper.ContactSensorArrayOperations();
_bumperPort.Subscribe(bumperNotificationPort);
Activate(
Arbiter.Receive<bumper.Update>
(true, bumperNotificationPort, BumperHandler));
}
private void BumperHandler(bumper.Update notification) ・・(2)
{
string message;
if (!notification.Body.Pressed)
return;
_state.MotorOn = !_state.MotorOn;
motor.SetMotorPowerRequest motorRequest =
new motor.SetMotorPowerRequest();
if (_state.MotorOn)
{
motorRequest.TargetPower = 1.0;
message = "Motor On";
}
else
{
motorRequest.TargetPower = 0.0;
message = "Motor Off";
}
_motorPort.SetMotorPower(motorRequest);
LogInfo(LogGroups.Console, message);
}
[ServiceHandler(ServiceHandlerBehavior.Concurrent)]
public virtual IEnumerator<ITask> GetHandler(Get get)
{
get.ResponsePort.Post(_state);
yield break;
}
}
}
----------------------------------------------------------
(2)のBumperHandlerメソッドでモーターをオン・オフしている。具体的には,TargetPowerプロパティに数値を指定して,SetMotorPowerメソッドでモーターの回転スピードを指定する。
この例では1.0で回転,0.0でストップだが,TargetPowerに0.3などと小さい値を指定すると,少しゆっくり回る。0.1では回らなかった。
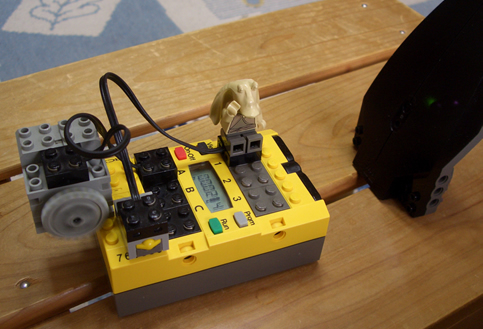
タッチセンサーは入力ポート1と3でセンスするが,モーターはポートAにつないだときだけ回る。なぜ出力ポートCにモーターをつないだときは回らないのか? 入力ポートと出力ポートを限定する設定はどこに記述されているのか? このあたりがまだわからない。



















































