4月23日 明るくなる前に目が覚めてしまった。年のせい?いや,今日は富山県ITセンターという施設でロボット体験会の講師を務める予定なので,なんとなく気がせいてしまったのだ。ITネットワークアシストたかおか(略称NAT)というボランティア団体に入っている私は,これまでも市の設備や小学校でロボット講習会の講師を務めてきたのだが,NATが富山県ITセンターの指定管理者になったので,県ITセンターでもロボット講習会を行うことになったのだ。
朝,NATの仲間を車に載せ,県ITセンターに向かう。さすがに県を冠する施設は立派だ。パソコンなども,ここで仕事がしたくなるほど充実している。住みつきたい。
体験会の数日前から当日の台本を用意した。最近はロボット講習会慣れしているので,当日のメニューだけを決めて詳細はその場で考えることが多い。そのほうが私自身が緊張感を持続できて,ダレないからだ。
でも,今回はしおらしく台本を用意してしまった。富山県ITセンターという名前にプレッシャーを感じたからだろうか。
最初はこんな風にはじめようと書いた。
【はじめに】
今日は体験会ということで2時間という短い時間でロボットの作成,プログラムの作成,車庫入れゲームといろいろやりたいのでムダなく進めたいと思います。だから,説明を聞くときは静かにしてください。ロボットを組み立てたり,ゲームをするときはにぎやかに楽しくやってください。
別に書いておかなくたって,いつもこんなことは話しているのだ。台本に頼っていたせいか自己紹介するのを忘れた。台本に「自己紹介をする」と書いておけばよかったか。言うこと,やることだけを箇条書きにしておくほうがよかった。
しばらく話しをしてから,「ああ,自己紹介を忘れてましたね。NATの金宏です。」と言った途端に台本はどうでもよくなった。
保護者向けには次のような惹句を用意した。
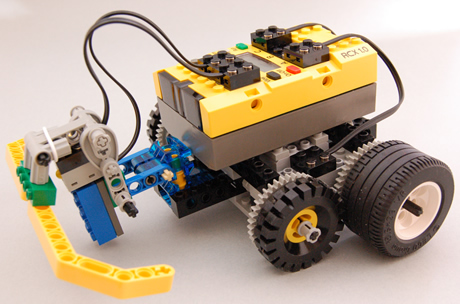
情報工房でのロボット体験会や講習会では,LEGOマインドストームのチームチャレンジセットという教材を使います。 LEGOマインドストームではLEGOブロックでロボットを組み立て,パソコンで作成したプログラムをマインドストームの本体に転送して,ロボットを動かします。つまりリモコンで操作するロボットではなく,プログラムを内蔵して自分で勝手に動く自律型のロボットを作ります。
ロボット講習会の目的は次世代のITを創る人を育てることです。LEGOマインドストームは,パソコンでプログラムを作るだけでなく,手を使ってブロックを組み立てるバランスの取れた教材です。手を使って創意工夫をすることで,学校の勉強やスポーツでは味わえないようなものづくりの面白さを感じることができるでしょう。自分で考えてロボットを組み立て,プログラムを作成するので論理的思考能力が育つはずです。また,ブロックで作ったロボットはこわれやすく,思い通りには動かないことが多いので,改良を繰り返していくうちに問題解決能力も養われることでしょう。
この体験会は,5月からの始まる連続的な講習会の呼び水なのだ。でも,見渡す限り保護者は1,2名しかいなかったので4行分程度しか話さなかった。
マインドストームの説明は以下のように台本に書いた
マインドストームの本体RCXは小さなコンピュータです。入力ができて,計算や記憶,そして出力ができます。みなさんの学校にある普通のコンピュータであるパソコンは
キーボードから文字を入力し,計算や加工をして,ディスプレイに出力します。
RCXはセンサーの値を入力として受け取ります。マインドストームに付いているセンサーは,光(ライト)センサーとタッチセンサーです。光センサーは光を放ち,その反射を読み取り,ロボットが暗いところの上にいるか明るい場所の上にいるかを判断します。タッチセンサーは小さな突起の付いた部品で,何かにぶつかっているかどうかを判断します。走っていて,何かにぶつかったら向きを変えるようにプログラムを作ることで障害物をよけて走るロボットを作成できます。
出力はモーターを回すことです。モーターの回転をギヤで伝えタイヤを回転させるだけでなく,ギヤの組み合わせで複雑な動きをさせることができます。
パソコンで作ったプログラムはIR TowerからRCXの赤外線ポートに送ります。
まあ,このあたりの説明はまともだ。でも,私は左手にテストシートを持ち,右にローバーを握り,「こんな風に動かすのだ」とぐりぐりとローバーが動く様子を示していた。
次に,ライントレースのデモンストレーションを行う。「集まれ,集まれ」というと子供たちはすぐに前に出てくる。高岡に比べるとやはり少し町の子なのか,モジモジ君はいない。

こんなプログラムで,ライントレースのデモを見せる。黒い線をなぞるようにロボットが進む側で「ここから光が出て,ここで反射を読みとって暗かったら,明るかったらと判断してモーターを動かすのだ」と説明するが,子供たちはまだ,ポカーンとしていた。
次にタッチセンサーを使うプログラムのデモを見せる。走っているローバーのバンパーにタッチして,タッチセンサーを押し込むと,ローバーが6秒間止まった後,また走り出すと説明し,RUNボタンを押して走らせると誰かがパッと手を出してバンパーを押し込んだ。ロボットは止まり,また走り出す。すると,また誰かが手を出した。このとき「ああ,この体験会はうまくいく」と感じた。
今回はまだセンサーを使わないで,シーケンス制御というロボットの動かし方を勉強しましょうと,たとえば5秒間真っ直ぐ進み,次に3秒間右に回り,止まるというように時間を指定してロボットを動かすことをシーケンス制御と呼ぶのだと説明した。

ローバーの作成を始める。上のローバーの画像のタッチセンサーとライトセンサーをはずした状態になるまで,ロボットを組み立てる。あらかじめパーツを揃えてあったので30分程度でみんなローバーを完成させた。今回は体験会なので,短い時間でいろいろな体験をできるようにパーツを揃えておいたが,たくさんの部品の山からガチャガチャと部品を探す苦労も味あわせてあげたい。たくさん触れば触るほど,部品の見分けは速くなる。
1番のスロットに入っているプログラムを実行してまっすぐ進むことを確認する。

「できた,できた」と喜ぶ声がする。待て,待て,お楽しみはこれからだ。
ROBOLABソフトウエアを起動して,プログラムの作り方を教える。関数パレットから,コマンドをブロックダイアグラムに配置して,ツールパレットのストリングツール(糸巻き)でつなぐ方法を教える。
AとCのモーターを順回転させると直進すること,片方のモーターを止めてもう一方だけを回転させると,どっちかに曲がることを説明して,まずL字型に進むプログラムを作ってみる。L字型にローバーを動かしてみせてから,プロジェクタで映しているお手本のプログラムを消す。
「さあ,自分で作ってみよう」というプログラムの作成を促す。ちゃんと聞いていなかったのか,説明したことを聞き返す子もいたが,結局はみんな成功する。子供の誇らしげな表情はいいなあと思う。
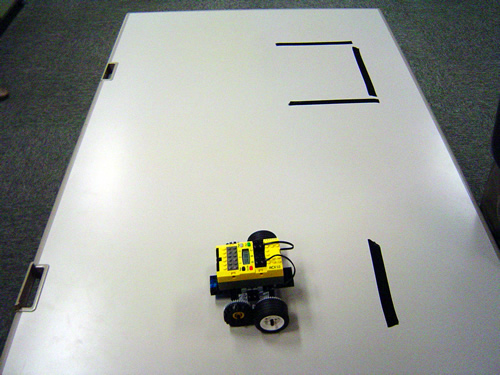
最後に車庫入れゲームをする。スタートラインから走り出して,車庫に入るようにプログラムを作成する。「バックで入れると,それらしくていいよ」とローバーを15分で組み立てた子には難しい注文を出す。車庫と言っても,黒いビニールテープで線を引いただけのものだ。
最近,私は黒ビニが気にいっている。ライトセンサーを使うロボットのテストもこの黒ビニで可能だろう。「黒ビニ一巻きあればいい」と言えるようにもっと芸を磨いてみようか。
何秒真っ直ぐ進んで,どれだけ曲がり,何秒進めば車庫に入るのかめいめいに調べ,プログラムを作成する。高学年の参加者の多いなか,小学三年生の参加者がいち早く車庫入れを成功させたのが目をひいた。彼は「テストしてはプログラムを変更」というループをちょこまかと回し,結果を出した。
彼を見ていたら「そうだわな,プログラミングの入門時には,あまり難しく考えず,とにかく動くプログラムを作り,テストをして結果を整えていく方法がいい」とあらためて気づいた。達成感を味わった後に理屈を考えることができれば身に付くだろう。
第223話 富山県ITセンターでロボット体験会を行う
あなたにお薦め
今日のピックアップ
-

不要な製品の購入を強いられる、ブロードコムのVMware買収で悪影響
-
米GitHubが「Workspace」を開始、ソフト開発の課題をAIが自動解決
-
Core Ultra搭載の「dynabook R9」、35時間駆動の実力
-
パスワード管理や不正サイト対策はEdgeもChromeも充実、複数機器の同期は選べる
-
コメント関連が使いやすくなった新Acrobat Reader、「クイックツールバー」に集約
-
M3搭載「MacBook Air」とM2搭載モデルを比較、外付けディスプレー2台接続も試す
-
有名人になりすまして投資広告を掲載、SNSで接触してみた結果
-
NECが受注したe-Govのガバクラ移行が大幅遅延、構築手法の途中変更が影響か
-
IIJ公式サイトのPVがある日突然13倍に、バズったわけでも炎上したわけでもない裏側
-
アリババのデジタル人材育成プログラム、世界の起業家や若者4千人以上にノウハウ提供
-
縦長のWebページ全体を画像で保存、メニューから選べるEdgeがChromeより便利
-
「四重苦」で伸び悩む日本市場、なぜ海外スマホメーカーが開拓に本腰を入れるのか












 注目記事
注目記事






おすすめのセミナー
-
「仮説立案」実践講座
例えば「必要な人材育成ができていない」といった課題に、あなたならどう取り組みますか? このセミナ...
-
CIO養成講座 【第35期】
業種を問わず活用できる内容、また、幅広い年代・様々なキャリアを持つ男女ビジネスパーソンが参加し、...
-
改革リーダーのコミュニケーション術
プロジェクトを成功に導くために改革リーダーが持つべき3つのコミュニケーションスキル—「伝える」「...
-
パワポ資料が見違える「ビジネス図解」4つのセオリー
インフォグラフィックスとは、形のない情報やデータなど伝えたいことを分かりやすい形で表現する技法で...
-
間違いだらけの設計レビュー
本セミナーでは、現場で多く見られる間違ったレビューの典型例を示し、そうならないための現場の改善策...
-
オンライン版「なぜなぜ分析」演習付きセミナー実践編
このセミナーでは「抜け・漏れ」と「論理的飛躍」の無い再発防止策を推進できる現場に必須の人材を育成...
-
問題解決のためのデータ分析活用入門
例えば「必要な人材育成ができていない」といった課題に、あなたならどう取り組みますか? このセミナ...
-
業務改革プロジェクトリーダー養成講座【第16期】
3日間の集中講義とワークショップで、事務改善と業務改革に必要な知識と手法が実践で即使えるノウハウ...








注目のイベント
-
日経クロステックNEXT 関西 2024
2024年5月16日(木)~5月17日(金)
-
日経ビジネスCEOカウンシル
2024年5月16日(木)17:00~19:50
-
WEURO DIVERSITY & INCLUSION FORUM
2024年5月17日(金)13:00~17:30(予定)
-
VUCA時代に勝ち残る戦略的サプライチェーン構築に向けて
2024年 5月 24 日(金) 10:00~16:20
-
人手不足を乗り越える 日本の産業界成長のシナリオ2024
2024年5月30日(木)10:20~17:45
-
人的資本経営版:日経ビジネスLIVE 2024 Spring
2024年6月3日(月)~6月5日(水)
-
DX Insight 2024 Summer
2024年6月4日(火)、5日(水)
-
付加価値ある意匠デザインを実現するものづくり技術2024
2024年6月7日(金)10:30 ~ 17:00
-
WOMAN EXPO 2024
2024年6月8日(土)10:00~17:30
-
デジタル立国ジャパン2024
2024年6月10日(月)、11日(火)










おすすめの書籍
-
ソフトバンク もう一つの顔 成長をけん引する課題解決のプロ集団
ソフトバンクにはモバイルキャリア事業以外のもう一つの顔が存在する。本書ではキーパーソンへのインタ...
-
対立・抵抗を解消し合意に導く 改革リーダーのコミュニケーション術
本書は、改革リーダーに必須のコミュニケーション術を3つのスキルの観点からまとめ上げたものです。今...
-
もっと絞れる AWSコスト超削減術
本書ではコスト課題を解決するため、AWSコストを最適化し、テクニックによって削減する具体策を紹介...
-
優秀な人材が求める3つのこと 退職を前提とした組織運営と人材マネジメント
「学生に人気のコンサルであっても、大手企業であっても、せっかく獲得した人材が数年で辞めてしまう...
-
Web3の未解決問題
ブロックチェーン技術を主軸とするWeb3の技術について、現在の社会制度との摩擦と、その先にある新...
-
ロボット未来予測2033
ロボットの用途・市場はどう拡大していくのか。AI実装でロボットはどこまで進化するのか。技術の進展...






日経BOOKプラスの新着記事
-
話題の本 書店別・週間ランキング(2024年4月第4週)
-
「永遠の命」を手にする4つのシナリオ 『「不死」の講義』
-
田内学 幸せに直結する「お金の減らし方」を学べる本
-
はじめに:『企業価値最大化経営』
-
プロほど入らない「○○保険」 貯蓄取り崩しを嫌う心理の不合理
-
昭和人間はなぜ大昔のことを「ついこのあいだ」のように語るのか
-
GWに「30代が読んでおきたい、おすすめビジネス名著」記事まとめ
-
すべての人に訪れる「死」と向き合う 『「不死」の講義』
-
はじめに:『ゼロからわかる マネーの常識 NISA、イデコから保険、税金、住宅ローンまで』
-
「麻布台ヒルズ」必見の建築デザイン6選 世界的設計事務所が共演









