
[画像のクリックで拡大表示]

[画像のクリックで拡大表示]

[画像のクリックで拡大表示]

[画像のクリックで拡大表示]
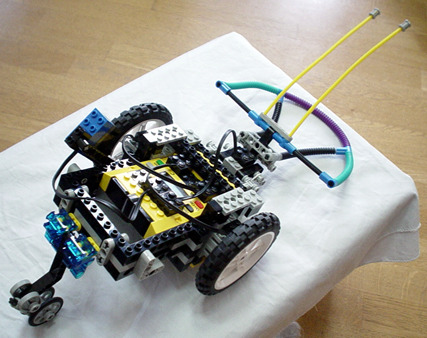
ロボットの動きは,ライトを感知して走り出し,障害物にぶつかったら,ビープ音を鳴らして後退し,方向を変え進み出すというものである。かずがロボットの本体を作りはじめる。RIS2.0の部品には面白いものが多いので,私もちょっと手伝ってみる。
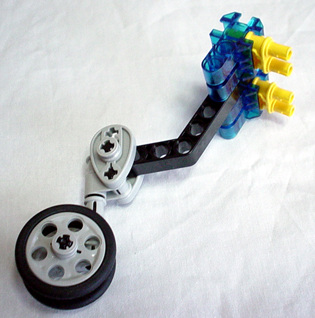
軸車輪である。タイヤがくるくる回るので方向を変えやすい。黄色や透明な青の連結部品がRIS1.0に比べるとシステマチックな感じがする。
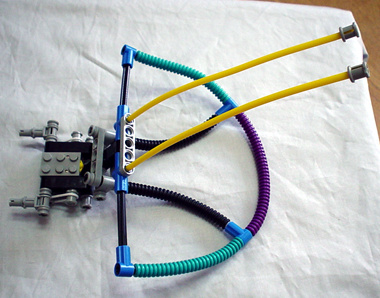
衝突を感知する仕組みには触覚がついている。昆虫のような触覚というイメージはRIS1.0の時からずっと受け継がれている。障害物にぶつかるとチューブが押され,タッチセンサーを押し込む仕組みだ。「チューブが,ぶつかったショックをやわらげるがや」と本体を作り終えたかずが,私の手からパーツを取り上げ,本体と合体させていく。
青いライトセンサーが左側のタイヤの上部についているのは,ライトを感知して走り出すためだ。進行方向は触覚の向きである。
さて,次はプログラムの作成である。これまでかずはサンプルプログラムを表示させ,微調整を行いプログラムを完成させてきた。床の素材や光の具合にあわせて,ロボットが確実に動くようにプログラムを直したり,動作を一部改良するためにプログラムをいじっていた。
果たして,どれぐらいプログラムが理解できているのだろうかと思い,「サンプルプログラムを表示させないで,自分でプログラムを作ってみられ」と声を掛けた。
かずは,ヒントを参考にしながら,迷うことなくホイホイとプログラムを作成していった。
RIS2.0ではプログラム作成時にも「リピートブロックが1つ必要です」などと,ヒントが表示されるので,プログラム作成を始めるときに「なに使えばいいがか,わからん」と途方にくれることがない。
プログラムをRCXにダウンロード,テストするとチャレンジの仕様通りに動いた。「すげー,このタッチセンサー確実に利くわ」と,かずがロボットを追い回している間にサンプルプログラムを見てみた。かずの作ったプログラムと構造は全く同じだった。唯一の違いは,ウェイト期限(ライト)で,サンプルプログラムはライトのブリンク(点滅)を待って走り出すようになっているのだが,かずのプログラムはライトセンサーが明るいと感じたら,走り出すようになっていた点である。
「かず,すごいね。サンプルとおんなじだわ。でも,どうやって明るいとライトセンサーに判断させるが?」とたずねると「最初,手でライトセンサーを囲っておいて,はなすが」と答える。
うーん,このへんがかずらしいと笑ってしまった。「お正月にお年玉でRIS2.0買おうかな」と言うかずに,誕生日に買ってやろうかと喉まで出かかったが,とりあえず飲み込んだ。



















































