かずは,兄こうしろうと違い口が回らない。言いたいことがあっても,すっと口から出てこない。しかし,その分体は良く動く。階段などは飛ぶように降りる。学校の階段なら,頑丈だからどう降りても構わないのだが,家の階段だと「壊れやしないか」と心配になる。
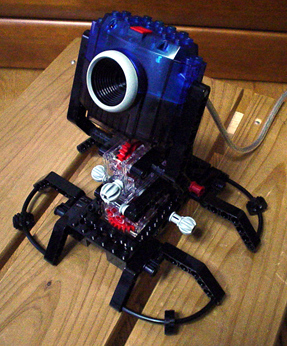
そんなかずにピッタリのタイトルのChallenges(チャレンジ)が『Body Remote』である。VISION COMMANDのレゴカム(PCカメラ)前で体を動かすと,それに合わせてMindStormsで作ったロボットが動くという代物である。
3月8日 かずは4脚のカメラスタンドとS'Cargobot(エスカルゴボット)を作る。
エスカルゴボットはその名の通り,かたつむりのようにゆっくり進む。
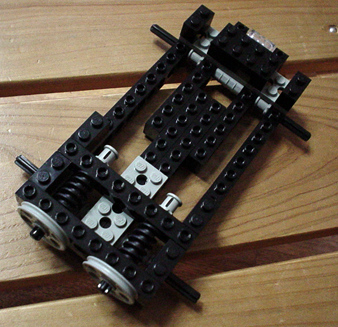
これが,ゆっくり進む仕組みである。モーターの回転をプーリーに伝え,プーリーがウォームギヤを回し,タイヤが回る。
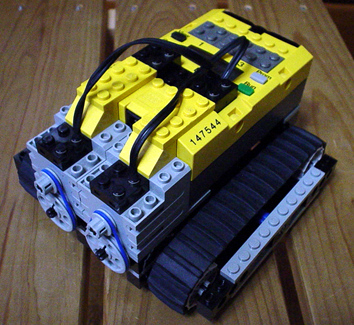
エスカルゴボット完成形である。プーリーが心地よいスピードで回転するのに対し,ロボットの動きが妙に鈍いところに愛嬌がある。
エスカルゴボットのProgram Brief(プログラムの概要)は,
The challenge is to drive and steer a remote rover by moving your hands infront of the camera.
Program the camera to watch for motion in each region.
Program each region to make the rover go in a different direction, like forward turn left, or stop.
である。理解するために何度か音読する。かずは「ぼく,英語なんかわかりーませーん」という姿勢で日本語で説明してくれるのを待っている。「かず,いつも同じような単語しか出てこないから,覚えようとすれば,だんだんわかるようになるよ」と説得するのだが,反応はふにゃふにゃしている。学校で習っていないことは,わからなくてもいいという態度に「違うだろう。学校の勉強がすべてじゃないだろう」と内心思う。
レゴカムの視界を分割するパターンは19を使う。
パターン19はきっとBody Remote専用なのであろう。他に使いようのないパターンだ。1から5の領域(region)で動き(motion)を検出する。1に何かが入ったら,Forward命令で2.0秒前進し,3ではBackwardでバック,4でSpinLeft(左折),5はSpinRight(右折),2でBrake(ブレーキ)をかけるようにプログラムを作成する。
ちょちょいとプログラム・ブロックをつなぎ終えたかずがレゴカムの前で元気よく体を動かすと,エスカルゴボットはノロノロとうごめいた。
VISION COMMANDはMindStormsのRIS(Robotics Invention System)に比べ,かなり簡単だ。RISのようにモーターを1つずつコントロ-ルしなくても,SpinRightとかSpinLeftという専用の命令があり,Brakeなんて命令で停止までする。ヒントは出るは,わからなかったらサンプルプログラムを表示させて,まねっこすることもできる。
ちょっと至れり尽せり過ぎて,失敗して「はがやしー思い」(富山弁解説:はがやしい 思うようにならず悔しく,イライラする思い)や,「今日はダメでも,今度また頑張ってなんとかしよう」という気持ちをかずに味あわせてやることができない。
第118話 かずにピッタリのBody Remote(ボディ・リモート)
あなたにお薦め
今日のピックアップ
-

不要な製品の購入を強いられる、ブロードコムのVMware買収で悪影響
-
米GitHubが「Workspace」を開始、ソフト開発の課題をAIが自動解決
-
Core Ultra搭載の「dynabook R9」、35時間駆動の実力
-
パスワード管理や不正サイト対策はEdgeもChromeも充実、複数機器の同期は選べる
-
コメント関連が使いやすくなった新Acrobat Reader、「クイックツールバー」に集約
-
M3搭載「MacBook Air」とM2搭載モデルを比較、外付けディスプレー2台接続も試す
-
有名人になりすまして投資広告を掲載、SNSで接触してみた結果
-
NECが受注したe-Govのガバクラ移行が大幅遅延、構築手法の途中変更が影響か
-
IIJ公式サイトのPVがある日突然13倍に、バズったわけでも炎上したわけでもない裏側
-
アリババのデジタル人材育成プログラム、世界の起業家や若者4千人以上にノウハウ提供
-
縦長のWebページ全体を画像で保存、メニューから選べるEdgeがChromeより便利
-
「四重苦」で伸び悩む日本市場、なぜ海外スマホメーカーが開拓に本腰を入れるのか












 注目記事
注目記事






おすすめのセミナー
-
DX時代のベーシックスキル
わかりやすい構成のeラーニングで、DX時代の働き方の基本となるビジネススキルを、先人の知見、先進...
-
1級建築施工管理技士 第1次検定対策(オンラインサービス)
本サービスは、1次検定突破に向けて不可欠な知識を学べる「動画講義」と、実力と知識の定着を測るため...
-
2024年度 技術士 建設部門 第二次試験対策「個別指導」講座
本講座は、効率的な勉強を通じて、2023年度 技術士 建設部門 第二次試験合格を目指される方向け...
-
技術士 建設部門 第二次試験対策 動画速修コース(オンラインサービス)
本コースは、“点が取れる論文の書き方”に絞った講義となっており、各問題の特徴から基本的な文章の書...
-
1級土木施工管理技士 第1次検定試験対策(オンラインサービス)
本サービスは、オンラインで1次検定突破に向けて不可欠な基本知識を学べる「動画講義」と過去問を繰り...
-
生成AIモデル学習を実現するチップレットパッケージ
スケーラブルなチップレットパッケージの傾向と課題を解説。光電融合技術に基づくCPOによるシステム...
-
自動車未来サミット2024
100年に1度といわれる変革期にある自動車業界。最近は電動化トレンドに変化が見られます。自動車業...
-
「仮説立案」実践講座
例えば「必要な人材育成ができていない」といった課題に、あなたならどう取り組みますか? このセミナ...








注目のイベント
-
日経クロステックNEXT 関西 2024
2024年5月16日(木)~5月17日(金)
-
日経ビジネスCEOカウンシル
2024年5月16日(木)17:00~19:50
-
WEURO DIVERSITY & INCLUSION FORUM
2024年5月17日(金)13:00~17:30(予定)
-
VUCA時代に勝ち残る戦略的サプライチェーン構築に向けて
2024年 5月 24 日(金) 10:00~16:20
-
人手不足を乗り越える 日本の産業界成長のシナリオ2024
2024年5月30日(木)10:20~17:45
-
人的資本経営版:日経ビジネスLIVE 2024 Spring
2024年6月3日(月)~6月5日(水)
-
DX Insight 2024 Summer
2024年6月4日(火)、5日(水)
-
付加価値ある意匠デザインを実現するものづくり技術2024
2024年6月7日(金)10:30 ~ 17:00
-
WOMAN EXPO 2024
2024年6月8日(土)10:00~17:30
-
デジタル立国ジャパン2024
2024年6月10日(月)、11日(火)










おすすめの書籍
-
2024-25年版 技術士第二次試験 建設部門 最新キーワード100
技術士試験の最新の出題内容や傾向を基に23-24年版を大幅に改訂。必須科目や選択科目の論述で不可...
-
実践 建設カーボンニュートラル
建設事業の脱炭素化の取り組みを網羅した初の書籍。材料、設計、施工、供用、解体の“建設ライフサイク...
-
図解 木造住宅トラブルワースト20+3 「雨漏り事故」「構造事故」の事例から学ぶ原因と対策
木造住宅のトラブルを「雨漏りワースト20」と「構造ワースト3」として類型化。原因と対策と損害額が...
-
東京大改造2030 都心の景色を変える100の巨大プロジェクト
建築や土木の専門記者が取材した、一歩踏み込んだ東京の再開発プロジェクトを豊富な写真や図面で紹介し...
-
一級建築士矩子と考える危ないデザイン
住宅や建築物で起こる身近な事故と背景、効果的な防止策を人気建築漫画「一級建築士矩子の設計思考」の...
-
ソフトバンク もう一つの顔 成長をけん引する課題解決のプロ集団
ソフトバンクにはモバイルキャリア事業以外のもう一つの顔が存在する。本書ではキーパーソンへのインタ...






日経BOOKプラスの新着記事










日経クロステック Special
総合
- ヤマ発高収益マリン事業、キャリア採用強化
- Webサイト運営の新手法「サイト群管理」
- AI活用を加速するストレージの要件は
- 経営の見える化を目指すマイナビの挑戦
- 生成AIとサイバー攻撃/重要な4つの観点
- PayPay銀行、新時代の銀行インフラ
- “新しい働き方”にふさわしいPCとは?
- システム運用を劇的に効率化するには?
- デザイナー、技術者必見のものづくり技術展
- 【生成AI事例】デジタルで現場をDX化
- 「クラウド時代のあるべき運用」を熱く議論
- 業務や役割に応じた「社員に最適なPC」
- 生成AI活用へ「待ったなし」成功の秘訣
- 目指すは相互に行き来できるマルチクラウド
- デルタ電子とロームが語る次世代電源戦略
- 医療セキュリティ対策の鍵はSaaS化?
- 「サーバ―」部門満足度トップ企業に訊く
- 大教大とマウスパソコン教室の在り方を研究
- NTTドコモ支援の実践型教育プログラム
- 欧州トップ企業語る日本のセキュリティー
- ジェイテクトエレクトロニクスのDX事例
- ビジネスPC、ITデバイス購買DXを推進
- 生成AIの活用の鍵は「内製とアジャイル」
- AIと自動化でエンジニアの能力を解き放て
- 専門家が斬る日本の意識と対策の現状は?
- 3段階で考える、DXで企業力を高める方法
- 守りながら攻める“製造DX”の方法論とは
- ランサムウエアから診療データはこう守る
- 最新サーバーに学ぶ熱設計の最前線
- PC管理の課題を課題をまるごと解決
- 日本語に強い「和製生成AIモデル」が誕生
- 動画解説>生成AIからDX変革まで
- 木質建築空間デザインコンテスト受付開始
- 生成AI活用でSAP BTPの価値が進化
- ServiceNowでDXを加速≫方法は
- SAPプロジェクトの全体像をいかに描くか
- 先端教育の現場で活躍する大学副学長が使い続けるレッツノート
- 毎月更新。電子エンジニア必見の情報サイト
- コンストラクション倶楽部