MindStormsに付属しているセンサーは、タッチセンサーと光センサーである。タッチセンサーを使うとロボットが何かにぶつかった後、方向を変えたりすることができる。では、ぶつかる前に方向を変えることはできないか…。それを実現するのが、接近センサーである。MindStormsの本体RCXには他のRCXと通信するために赤外線を入出力する機能がついている。「一家に2台もRCXが、あるはずないから、こんな機能は無駄だ。」と私は思っていたのであるが赤外線を出力し、その反射を光センサーで読み取り、障害物を避けることができるのである。
「こうしろう、無限軌道車に光センサーつけて」、「どこにつければ、いいが?」、「うーん、赤外線を出すところの近くだろうね」、「うん」と言ってこうしろうが作ったロボットにはレゴ人ならでは気配りが施してあった。
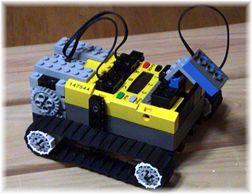
光センサーを可動式にして角度を調節できるようになっている。「はーん、赤外線の反射がうまく読み取りできなかったら、角度を変えればいいがいね。」(富山弁解説:「いいが?」とか「いいがいね」という富山弁に、もう読者の方は慣れておられると思うので解説は割愛します。)「さあ、次はプログラム入力してみて」
int lastlevel;
task send_signal()
{
while(true)
{SendMessage(0);Wait(10);}
}
task check_signal()
{
while(true)
{
lastlevel = SENSOR_1;
if(SENSOR_1 > lastlevel + 200)
{OnRev(OUT_C);Wait(115);OnFwd(OUT_A+OUT_C);}
}
}
task main()
{
SetSensorType(SENSOR_1,SENSOR_TYPE_LIGHT);
SetSensorMode(SENSOR_1,SENSOR_MODE_RAW);
OnFwd(OUT_A+OUT_C);
start send_signal;
start check_signal;
}
RCXにプログラムをダウンロードしてテストすると、同じ場所でぐるぐるまわっている。「あれ、照明の光を読み取っているのかな…」などと悩み、モーターの配線が一本逆になっていることに気付くまで多くの時間を要してしまった。ミスはいつも簡単なところにあるのだが、必ず難しいところから疑ってしまう。これからは「ロボットを作ったら『かずのリモコン』で動作を確認する。」ということを今日の教訓とした。気を取り直してテストを行うと、タンスに衝突する15cm手前でロボットは見事に方向を変えた。「これ、すごいな」とこうしろうと父は声を揃えた。
send_signalタスクでは {SendMessage(0);Wait(10);}で0.1秒に一回、赤外線を出力している。check_signal タスクでは、変数lastlevelに光センサーが読み取った値を格納し、次に読み取った値と比較している。「if(SENSOR_1
> lastlevel + 200)」の個所である。その差が200以上になったら、何かに近づいたと判断しているのである。
第36話 NQCプログラミング:NQCで接近センサーを作る
あなたにお薦め
今日のピックアップ
-

不要な製品の購入を強いられる、ブロードコムのVMware買収で悪影響
-
米GitHubが「Workspace」を開始、ソフト開発の課題をAIが自動解決
-
Core Ultra搭載の「dynabook R9」、35時間駆動の実力
-
パスワード管理や不正サイト対策はEdgeもChromeも充実、複数機器の同期は選べる
-
コメント関連が使いやすくなった新Acrobat Reader、「クイックツールバー」に集約
-
M3搭載「MacBook Air」とM2搭載モデルを比較、外付けディスプレー2台接続も試す
-
有名人になりすまして投資広告を掲載、SNSで接触してみた結果
-
NECが受注したe-Govのガバクラ移行が大幅遅延、構築手法の途中変更が影響か
-
IIJ公式サイトのPVがある日突然13倍に、バズったわけでも炎上したわけでもない裏側
-
アリババのデジタル人材育成プログラム、世界の起業家や若者4千人以上にノウハウ提供
-
縦長のWebページ全体を画像で保存、メニューから選べるEdgeがChromeより便利
-
「四重苦」で伸び悩む日本市場、なぜ海外スマホメーカーが開拓に本腰を入れるのか












 注目記事
注目記事






おすすめのセミナー
-
「仮説立案」実践講座
例えば「必要な人材育成ができていない」といった課題に、あなたならどう取り組みますか? このセミナ...
-
CIO養成講座 【第35期】
業種を問わず活用できる内容、また、幅広い年代・様々なキャリアを持つ男女ビジネスパーソンが参加し、...
-
改革リーダーのコミュニケーション術
プロジェクトを成功に導くために改革リーダーが持つべき3つのコミュニケーションスキル—「伝える」「...
-
パワポ資料が見違える「ビジネス図解」4つのセオリー
インフォグラフィックスとは、形のない情報やデータなど伝えたいことを分かりやすい形で表現する技法で...
-
間違いだらけの設計レビュー
本セミナーでは、現場で多く見られる間違ったレビューの典型例を示し、そうならないための現場の改善策...
-
オンライン版「なぜなぜ分析」演習付きセミナー実践編
このセミナーでは「抜け・漏れ」と「論理的飛躍」の無い再発防止策を推進できる現場に必須の人材を育成...
-
問題解決のためのデータ分析活用入門
例えば「必要な人材育成ができていない」といった課題に、あなたならどう取り組みますか? このセミナ...
-
業務改革プロジェクトリーダー養成講座【第16期】
3日間の集中講義とワークショップで、事務改善と業務改革に必要な知識と手法が実践で即使えるノウハウ...








注目のイベント
-
日経クロステックNEXT 関西 2024
2024年5月16日(木)~5月17日(金)
-
日経ビジネスCEOカウンシル
2024年5月16日(木)17:00~19:50
-
WEURO DIVERSITY & INCLUSION FORUM
2024年5月17日(金)13:00~17:30(予定)
-
VUCA時代に勝ち残る戦略的サプライチェーン構築に向けて
2024年 5月 24 日(金) 10:00~16:20
-
人手不足を乗り越える 日本の産業界成長のシナリオ2024
2024年5月30日(木)10:20~17:45
-
人的資本経営版:日経ビジネスLIVE 2024 Spring
2024年6月3日(月)~6月5日(水)
-
DX Insight 2024 Summer
2024年6月4日(火)、5日(水)
-
付加価値ある意匠デザインを実現するものづくり技術2024
2024年6月7日(金)10:30 ~ 17:00
-
WOMAN EXPO 2024
2024年6月8日(土)10:00~17:30
-
デジタル立国ジャパン2024
2024年6月10日(月)、11日(火)










おすすめの書籍
-
ソフトバンク もう一つの顔 成長をけん引する課題解決のプロ集団
ソフトバンクにはモバイルキャリア事業以外のもう一つの顔が存在する。本書ではキーパーソンへのインタ...
-
対立・抵抗を解消し合意に導く 改革リーダーのコミュニケーション術
本書は、改革リーダーに必須のコミュニケーション術を3つのスキルの観点からまとめ上げたものです。今...
-
もっと絞れる AWSコスト超削減術
本書ではコスト課題を解決するため、AWSコストを最適化し、テクニックによって削減する具体策を紹介...
-
優秀な人材が求める3つのこと 退職を前提とした組織運営と人材マネジメント
「学生に人気のコンサルであっても、大手企業であっても、せっかく獲得した人材が数年で辞めてしまう...
-
Web3の未解決問題
ブロックチェーン技術を主軸とするWeb3の技術について、現在の社会制度との摩擦と、その先にある新...
-
ロボット未来予測2033
ロボットの用途・市場はどう拡大していくのか。AI実装でロボットはどこまで進化するのか。技術の進展...






日経BOOKプラスの新着記事
-
話題の本 書店別・週間ランキング(2024年4月第4週)
-
「永遠の命」を手にする4つのシナリオ 『「不死」の講義』
-
田内学 幸せに直結する「お金の減らし方」を学べる本
-
はじめに:『企業価値最大化経営』
-
プロほど入らない「○○保険」 貯蓄取り崩しを嫌う心理の不合理
-
昭和人間はなぜ大昔のことを「ついこのあいだ」のように語るのか
-
GWに「30代が読んでおきたい、おすすめビジネス名著」記事まとめ
-
すべての人に訪れる「死」と向き合う 『「不死」の講義』
-
はじめに:『ゼロからわかる マネーの常識 NISA、イデコから保険、税金、住宅ローンまで』
-
「麻布台ヒルズ」必見の建築デザイン6選 世界的設計事務所が共演









