9月19日 午前6時起床。この日は私にとって長い一日となった。こうしろうの所属している少年野球のチームの配車当番にあたっているため、7時には学校へ行かなくてはならないのだ。配車当番とは、少年野球の選手たちを試合会場に送迎するための当番である。会場につくと子供たちは練習をはじめた。私は球拾いをしたり、コンピュータ雑誌を読んだりして、試合開始の時刻をまっていた。
9時試合開始。こうしろうのチームは2試合とも勝利し、ベスト8に勝ち進んだ。残念ながら、こうしろうのポジションは3塁コーチャーズ・ボックスである。3塁こうちゃんというダジャレではない(はずだ)。
午後2時30分帰宅。遅めの昼食をとって一休みする。4時から姪にロータス1-2-3を教えにいく予定である。不覚にも少しまどろんでしまい30分ほど遅刻した。姪は今年、高校一年生になった。学校でDOS版の1-2-3の試験があると聞いたので、講師をかってでた。しかし考えてみるとDOS版の1-2-3を使わなくなってからもう10年近くになる。何故、高校でDOS版の1-2-3を教えるのだろうか。単に新しいPCが少ないからか。あるいは、Windowsの便利さを実感させるため、一度面倒なDOS版のソフトウェアを使わせようという作戦なのか。
「どこらへんが、自信ないの?」と聞いてみると「関数とか…」という答えが返ってきた。「よし、おじさん算数は自信ないけど、関数ならまかせとき」と高校生になって、めっきりおとなぽっくなった姪に胸をはった。「@SUMは合計をとり、@AVGは平均で、@IF(condition,truepart,falsepart)は条件によって返す値を設定するんだ」。ここまで説明して、「へぇー」と感心した。「DOS版の1-2-3の中に、SQLの集計関数も、Visual BasicのIIF関数もあるじゃないか。これはいい教材だ」。試験に出そうなところと間違いやすいところをメモして、「試験前にこれチェックしてね。」と言い残し、足早に姪の家を去った。
実は今晩は“焼肉”なのである。クローン牛について報道されるようになってから、肉はスーパーではなく肉屋で購入するようになった。それ以来、我が家の焼肉は格段の進歩を遂げた。まず、野菜を山ほど焼いて強制的に配給する。次にロース、カルビと主役級の出番となる。一息ついたところで、最近の人気メニュー、ホルモン焼きに移る。ホルモンはキャベツを添えて塩で焼く。ホルモンの塩焼を教えてくれたのは肉屋の店主である。はじめてホルモンを購入したとき、「ホルモンちゃ、タレで焼きゃいいけ?」と尋ねると「なーん。塩で焼かれ。んまいよ」と教えてくれた。(富山弁解説 “なーん”は軽い否定を表す。フランス語の“ノン”が間延びして意味が弱くなったと考えていただけばよい)。“んまい”は“うまい”の最上級である。近所に『んまい屋』というもんじゃ焼きの店がある。本当に“んまい”。
おっと、マインドストームの話がまだ出てこない。この連載は「こうしろうのMindStorms日記」であった。このままでは筆者の「或る日の日記」になってしまう。しかし、しかしである。最後に“そば焼き”を食べないと焼肉フルコースは終了しない。“そば焼き”は焼きそばとは違う。焼きそばをチープにして、おつまみとして仕上げたような作品である。まず、めんを焼き、しばらくしてからキャベツを加え、塩、コショウ、ウスターソースで味付けをし、カラカラになるまで焼いて完成となる。塩、コショウを利かせるとGoodだ。この料理を知ったのは学生時代に入った小さな汚い飲み屋で、あまりの値段の安さにつられ注文した時である。やっと、2時間に及ばんとする夕食が終わりを告げた。
9時になると、こうしろうはうれしい顔をしてマインドストームを持ってくる。ビール1リットルを腹におさめた父は、勝手にやってくれモードで寝転んでいる。しばらくすると、こうしろうが「デザイング ザ ロボット」、「プログラミング ザ ロボット」と流暢な英語をモニターに向かってしゃべり始めた。「お前、今英語しゃべっとらんだか?」間抜けな質問をする。「そりゃ、何回も聞いとりゃ、わかっちゃ」とこうしろう。日本語版が出ていなくて良かったと思った。
先日、小学生にも試験的に早期英語教育をするというニュースを妻とテレビで見ていた。「一部の子供しか受けられないなんて不公平だわ」と妻は言った。男に比べて女は“不公平”というセリフが多いのではないかと思う。男は「どうせ世の中なんて不公平さ」とさめている。妻よ。君が「また、片付けるの面倒なものを買ったのね」とこぼしていたマインドストームは英語の教材にもなるんだよ。
さて、トレーニングセンターでこうしろうが本日学習した内容はタッチセンサーの使い方である。タッチセンサーはブロックの先に押すと引っ込む突起物がついており、その小さな突起物の状態で何かにぶつかっているか、離れているかを感知する。
RCXの入力ポートにケーブルで接続する。タッチセンサーの状態にしたがってロボットの動きを変えるプログラムをこうしろうが、トレーニングセンターの講師に言われるままに作成していく。まだ、自分でプログラムを作成しているという実感はないようだ。
タッチセンサーのトレーニングで作成したプログラム
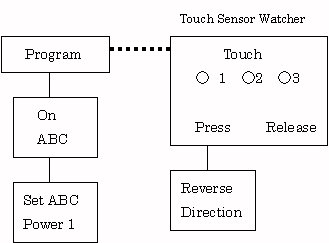
このプログラムでは、まずOn ABCで出力ポートをオンにし、モーターを回転させる。Set ABC Power 1で、モーターの速度を最低速にする。Powerは1~8の範囲で設定できる。ロバート君のようにモーターを2個接続して、ひとつひとつがタイヤを回すロボットの場合は、Power 3程度で結構速い。
Touch Sensor Watcherはプログラムブロックの右側に接続する。1,2,3とラジオボタンがあり、入力ポートに対応している。タッチセンサーをつないだポートにチェックをつける。Press(プレス側)、Release(リリース側)それぞれにコマンドブロックなどをぶら下げていくことができる。上記の例ではPress側にモーターを逆回転させるReverse
Directionブロックをつないでいる。
ロバート君にプログラムをダウンロードして、こうしろうがRunスイッチを押すと、前進して私に近づいてくる。タッチセンサーを指で押すとReverse Directionが効き、後退していくがロバート君は大八車のような構造だから、タッチセンサーを押したときの指の向きで、あらぬ方向へ行ったりする。
第3話 なぜかDOSの1-2-3の話題を
あなたにお薦め
今日のピックアップ
-

不要な製品の購入を強いられる、ブロードコムのVMware買収で悪影響
-
米GitHubが「Workspace」を開始、ソフト開発の課題をAIが自動解決
-
Core Ultra搭載の「dynabook R9」、35時間駆動の実力
-
パスワード管理や不正サイト対策はEdgeもChromeも充実、複数機器の同期は選べる
-
コメント関連が使いやすくなった新Acrobat Reader、「クイックツールバー」に集約
-
M3搭載「MacBook Air」とM2搭載モデルを比較、外付けディスプレー2台接続も試す
-
有名人になりすまして投資広告を掲載、SNSで接触してみた結果
-
NECが受注したe-Govのガバクラ移行が大幅遅延、構築手法の途中変更が影響か
-
IIJ公式サイトのPVがある日突然13倍に、バズったわけでも炎上したわけでもない裏側
-
アリババのデジタル人材育成プログラム、世界の起業家や若者4千人以上にノウハウ提供
-
縦長のWebページ全体を画像で保存、メニューから選べるEdgeがChromeより便利
-
「四重苦」で伸び悩む日本市場、なぜ海外スマホメーカーが開拓に本腰を入れるのか












 注目記事
注目記事






おすすめのセミナー
-
「仮説立案」実践講座
例えば「必要な人材育成ができていない」といった課題に、あなたならどう取り組みますか? このセミナ...
-
CIO養成講座 【第35期】
業種を問わず活用できる内容、また、幅広い年代・様々なキャリアを持つ男女ビジネスパーソンが参加し、...
-
改革リーダーのコミュニケーション術
プロジェクトを成功に導くために改革リーダーが持つべき3つのコミュニケーションスキル—「伝える」「...
-
パワポ資料が見違える「ビジネス図解」4つのセオリー
インフォグラフィックスとは、形のない情報やデータなど伝えたいことを分かりやすい形で表現する技法で...
-
間違いだらけの設計レビュー
本セミナーでは、現場で多く見られる間違ったレビューの典型例を示し、そうならないための現場の改善策...
-
オンライン版「なぜなぜ分析」演習付きセミナー実践編
このセミナーでは「抜け・漏れ」と「論理的飛躍」の無い再発防止策を推進できる現場に必須の人材を育成...
-
問題解決のためのデータ分析活用入門
例えば「必要な人材育成ができていない」といった課題に、あなたならどう取り組みますか? このセミナ...
-
業務改革プロジェクトリーダー養成講座【第16期】
3日間の集中講義とワークショップで、事務改善と業務改革に必要な知識と手法が実践で即使えるノウハウ...








注目のイベント
-
日経クロステックNEXT 関西 2024
2024年5月16日(木)~5月17日(金)
-
日経ビジネスCEOカウンシル
2024年5月16日(木)17:00~19:50
-
WEURO DIVERSITY & INCLUSION FORUM
2024年5月17日(金)13:00~17:30(予定)
-
VUCA時代に勝ち残る戦略的サプライチェーン構築に向けて
2024年 5月 24 日(金) 10:00~16:20
-
人手不足を乗り越える 日本の産業界成長のシナリオ2024
2024年5月30日(木)10:20~17:45
-
人的資本経営版:日経ビジネスLIVE 2024 Spring
2024年6月3日(月)~6月5日(水)
-
DX Insight 2024 Summer
2024年6月4日(火)、5日(水)
-
付加価値ある意匠デザインを実現するものづくり技術2024
2024年6月7日(金)10:30 ~ 17:00
-
WOMAN EXPO 2024
2024年6月8日(土)10:00~17:30
-
デジタル立国ジャパン2024
2024年6月10日(月)、11日(火)










おすすめの書籍
-
ソフトバンク もう一つの顔 成長をけん引する課題解決のプロ集団
ソフトバンクにはモバイルキャリア事業以外のもう一つの顔が存在する。本書ではキーパーソンへのインタ...
-
対立・抵抗を解消し合意に導く 改革リーダーのコミュニケーション術
本書は、改革リーダーに必須のコミュニケーション術を3つのスキルの観点からまとめ上げたものです。今...
-
もっと絞れる AWSコスト超削減術
本書ではコスト課題を解決するため、AWSコストを最適化し、テクニックによって削減する具体策を紹介...
-
優秀な人材が求める3つのこと 退職を前提とした組織運営と人材マネジメント
「学生に人気のコンサルであっても、大手企業であっても、せっかく獲得した人材が数年で辞めてしまう...
-
Web3の未解決問題
ブロックチェーン技術を主軸とするWeb3の技術について、現在の社会制度との摩擦と、その先にある新...
-
ロボット未来予測2033
ロボットの用途・市場はどう拡大していくのか。AI実装でロボットはどこまで進化するのか。技術の進展...















